
I am a PhD student at the Max Planck Institute for Intelligent Systems, focusing on collective action in ML and novel generative modeling frameworks. My research explores how individuals can coordinate data modifications to influence machine learning outcomes, alongside the creation of new generative modeling frameworks. I am passionate about the interaction of machine learning with the real world, from what we can learn about the world using ML, to how society and ML can influence each other.
-
2026-05-14
I was recognized as a silver reviewer for ICML 2026!
-
2025-12-06
Our work on collective action for fairness in machine learning was selected to be an oral presentation at the Algorithmic Collective Action workshop in NeurIPS 25!
-
2025-11-14
Our preprint Adaptive Symmetrization of the KL Divergence is now available on arXiv.
-
2025-10-17
I was selected as a top reviewer for Neurips 2025!
-
2025-08-22
Our preprint Fairness for the People, by the People: Minority Collective Action is now available on arXiv.
-
2025-07-27
I am giving a non-technical talk at Tübingen Days of Digital Freedom 2025 event about collective action for fairness in machine learning.
-
2025-04-01
Visiting École Polytechnique in Paris for 3 months to work with Luiz Chamon.
-
2024-10-01
Visiting Copenhagen university for 3 months to work with Amartya Sanyal.
 Adaptive Symmetrization of the KL DivergencearXiv, 2025arXiv project video
Adaptive Symmetrization of the KL DivergencearXiv, 2025arXiv project videoabstract
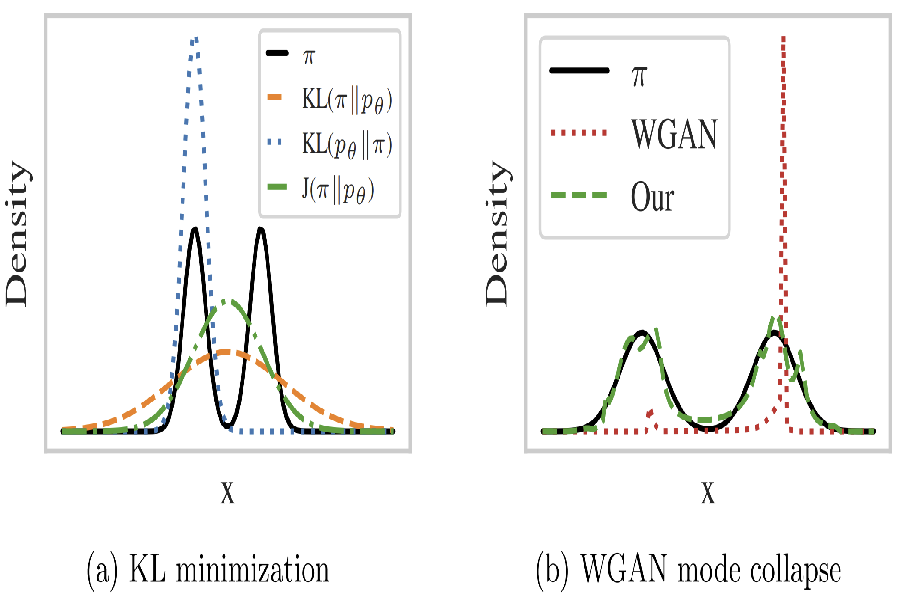
Many tasks in machine learning can be described as or reduced to learning a probability distribution given a finite set of samples. A common approach is to minimize a statistical divergence between the (empirical) data distribution and a parameterized distribution, e.g., a normalizing flow (NF) or an energy-based model (EBM). In this context, the forward KL divergence is a ubiquitous due to its tractability, though its asymmetry may prevent capturing some properties of the target distribution. Symmetric alternatives involve brittle min-max formulations and adversarial training (e.g., generative adversarial networks) or evaluating the reverse KL divergence, as is the case for the symmetric Jeffreys divergence, which is challenging to compute from samples. This work sets out to develop a new approach to minimize the Jeffreys divergence. To do so, it uses a proxy model whose goal is not only to fit the data, but also to assist in optimizing the Jeffreys divergence of the main model. This joint training task is formulated as a constrained optimization problem to obtain a practical algorithm that adapts the models priorities throughout training. We illustrate how this framework can be used to combine the advantages of NFs and EBMs in tasks such as density estimation, image generation, and simulation-based inference.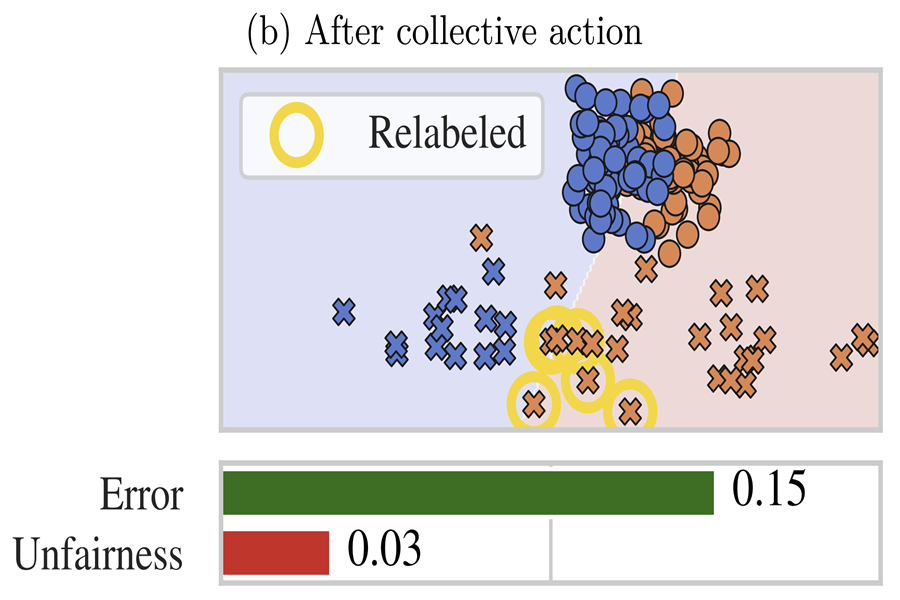 Fairness for the People, by the People: Minority Collective ActionarXiv, 2025arXiv project video
Fairness for the People, by the People: Minority Collective ActionarXiv, 2025arXiv project videoabstract
Machine learning models often preserve biases present in training data, leading to unfair treatment of certain minority groups. Despite an array of existing firm-side bias mitigation techniques, they typically incur utility costs and require organizational buy-in. Recognizing that many models rely on user-contributed data, end-users can induce fairness through the framework of Algorithmic Collective Action, where a coordinated minority group strategically relabels its own data to enhance fairness, without altering the firm’s training process. We propose three practical, model-agnostic methods to approximate ideal relabeling and validate them on real-world datasets. Our findings show that a subgroup of the minority can substantially reduce unfairness with a small impact on the overall prediction error.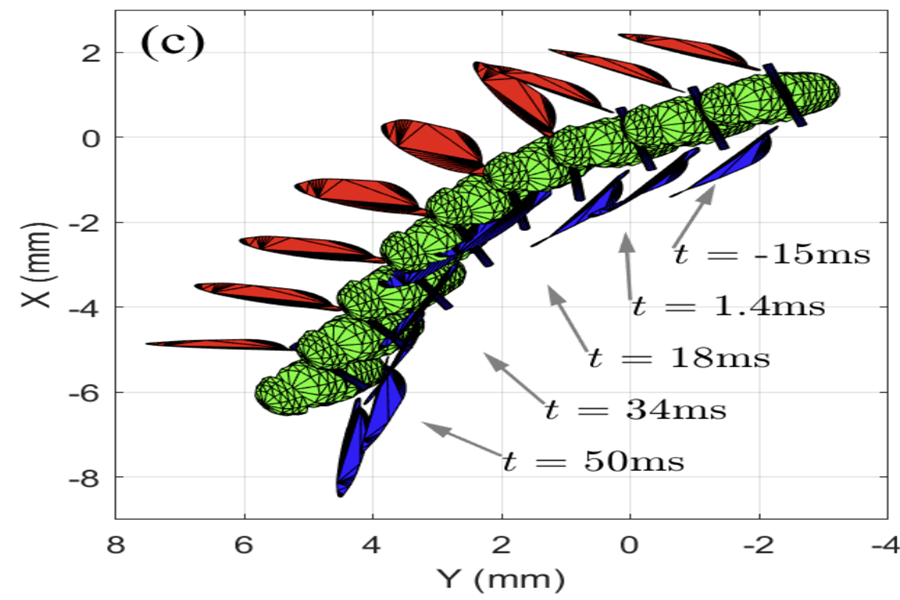 Model-Based Tracking of Fruit Flies in Free FlightInsects, 2022paper
Model-Based Tracking of Fruit Flies in Free FlightInsects, 2022paperabstract
Insect flight is a complex interdisciplinary phenomenon. Understanding its multiple aspects, such as flight control, sensory integration, physiology and genetics, often requires the analysis of large amounts of free flight kinematic data. Yet, one of the main bottlenecks in this field is automatically and accurately extracting such data from multi-view videos. Here, we present a model-based method for the pose estimation of free-flying fruit flies from multi-view high-speed videos. To obtain a faithful representation of the fly with minimum free parameters, our method uses a 3D model that includes two new aspects of wing deformation: A non-fixed wing hinge and a twisting wing surface. The method is demonstrated for free and perturbed flight. Our method does not use prior assumptions on the kinematics apart from the continuity of the wing pitch angle. Hence, this method can be readily adjusted for other insect species.